
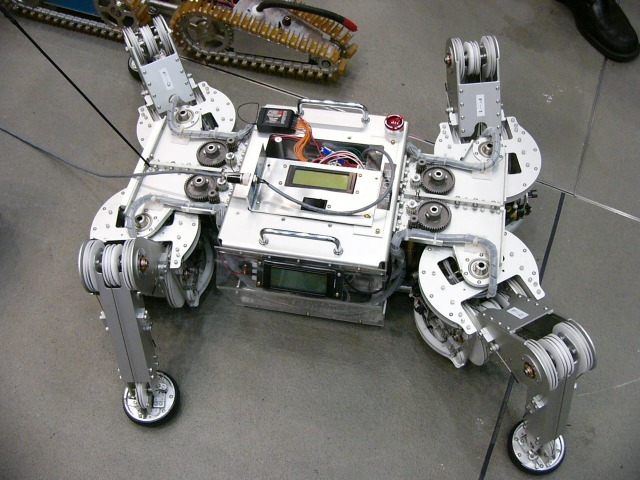

Roller Walkerは、脚型移動ロボットと車輪型ロボットの両方の特質を兼ね備えた、 特殊な移動機構を備えた脚―車輪ハイブリッド型移動機械です。 Roller Walkerは、歩行モード用の足裏を倒すとそれがローラースケートモード用の受動車輪となり、 脚を動かしてローラースケートのように推進することができます。 硬平地上で活用可能なローラースケートモードは高速な移動を実現します。 一方、歩行モードはローラースケートモードよりも推進速度が落ちるものの、 不整地で高い踏破性を発揮します。 Roller Walkerは当社の6軸コントロールボードとTITechSH2コントローラーを搭載しています。 Roller Walkerはロコモーション研究用プラットフォームに理想的なロボットとして、 国内の多数の大学の研究室様に広く利用されています。 また、Roller Walkerご購入の際には、 足首制御メカニズムおよびコンピューターシステムの搭載有無を選択できます。
はい、ローラーウォーカー・・・・元ネタは甲殻機動隊?
士郎正宗 恐るべし!!